
Рис. Aktivlenkung
Это решение, разработанное совместно ZF - Aktivlenkung Gmbh и департаментом рулевых систем BMW, заменяет существующие компромиссы между спортивной и удобной конструкцией рулевого управления.
Поскольку Aktivlenkung Gmbh является компанией Robert Bosch Gmbh и ZF Freiedrichshafen AG, следует отметить, что новый дизайн, безусловно повышающий комфорт и активную безопасность вождения, является результатом сотрудничества трех ведущих автомобильных компаний. В активной системе рулевого управления использовалась система ZF Servo tronik, уже известная многими удобными применениями.
Основные функции
Активное рулевое управление состоит из: гидравлического редуктора, планетарного редуктора, электродвигателя, нескольких датчиков и устройства управления. Дополнительная степень свободы позволяет постоянно оптимизировать коэффициент рулевого управления, комфорт, усилие и комфорт водителя в зависимости от ситуации. В зависимости от дорожных условий угол поворота рулевого колеса увеличивается или уменьшается по отношению к угловому движению, вызванному водителем на руле.
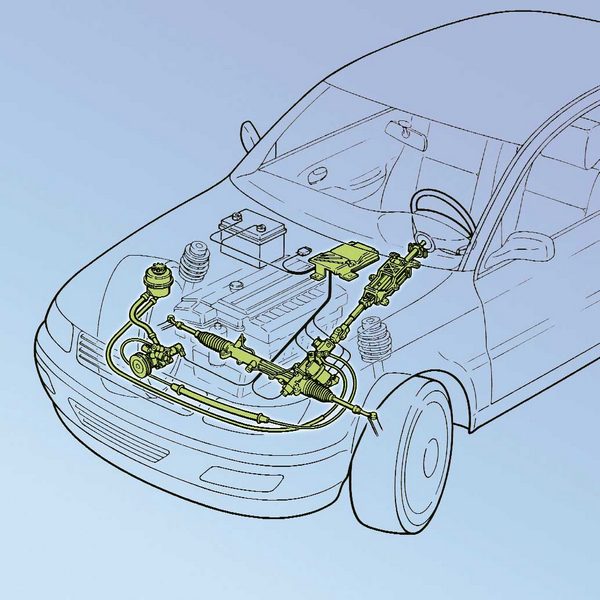
Рис. 1. Расположение активных элементов рулевого управления ZF
При движении на низкой скорости, например, в городе, требуется постоянная высокая сила кручения на руле. Его уменьшение достигается благодаря использованию электродвигателя, взаимодействующего с планетарной системой, что приводит к меньшим угловым движениям рулевого колеса, дает желаемые углы поворота и одновременно уменьшает усилие, оказываемое водителем.
Однако на высоких скоростях автомобиля водителю не нужно опасаться потери сцепления с колесом, если рулевое колесо слишком сильное, потому что применяемый электродвигатель с планетарной системой вызывает соответствующее уменьшение угла поворота колес. Когда электродвигатель не активен, рулевое колесо воздействует непосредственно на основную рулевую трансмиссию, как в обычной системе рулевого управления, вызывая пропорциональное рулевое управление колесами. Благодаря этому водитель также может вмешиваться в работу автономной системы.
Эта система постоянно контролируется комплексной системой датчиков, которая обеспечивает безопасность вождения. Если необходимо отключить его, автомобиль использует только стандартный усилитель рулевого управления с усилителем рулевого управления.
Активная система рулевого управления является первым шагом для полностью автоматических систем рулевого управления. Его удовлетворительная работа основана на высоком качестве отдельных элементов. Это касается и их адаптации к различным внешним условиям.
Строительство и эксплуатация
Управляемое электроникой, зависящее от скорости, рулевое управление с реечной передачей (рис. 2) требует небольших усилий на руле при парковке и движении на низких скоростях, например, при парковке или опускании автостоянки. На более высоких скоростях усилие, необходимое для поворота рулевого колеса, увеличивается, так что у водителя появляется лучшее чувство контакта между колесами и дорогой, что облегчает его точную адаптацию к дорожным условиям. Эта активная система рулевого управления (рис. 3) расположена между двухпозиционным сервоклапаном с поворотным ползунком (2) и корпусом главного рулевого механизма (1). Кроме того, он соединен с дифференциальной планетарной передачей (4), имеющей два входных вала и один выходной вал. Этот блок передает рулевой момент от рулевого колеса через рулевую колонку и двухпозиционный сервоклапан с поворотной заслонкой, а также от электродвигателя (3) на шестерню главной передачи. Это означает, что благодаря дифференциальной передаче (4) результирующий крутящий момент передается на главную передачу.
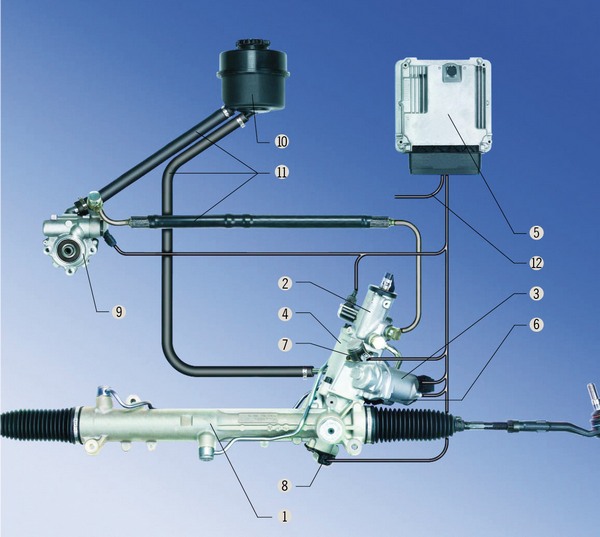
Рис. 2. Схема системы ZF-Сервотроник 2
1. зубчатая передача, 2. соленоидный клапан гидравлической опоры, 3. электродвигатель, 4. дифференциал, 5. электронный контроллер, 6. датчик угла поворота двигателя, 7. электромагнитный замок, 8. датчик вращения шестерни, 9. гидравлический насос, 10. бак для жидкости, 11. гидравлические линии, 12 электрических проводов
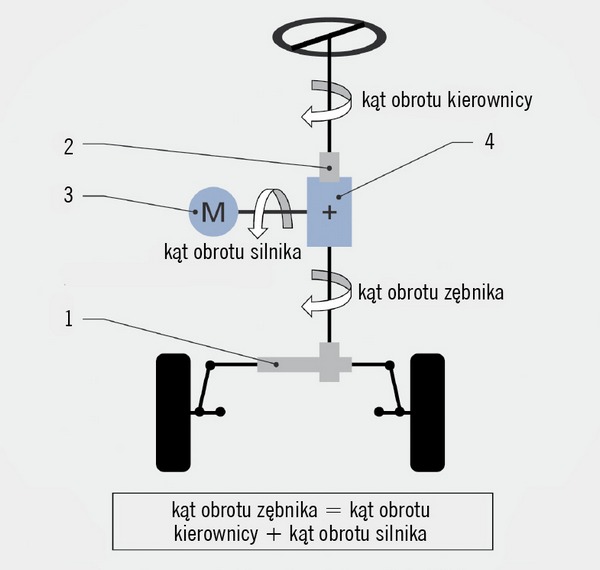
Рис. 3. Принцип работы системы
Сотрудничество механиков, электротехники и электроники
Датчики угла поворота двигателя (6) (рис. 4) и угла поворота зубчатого колеса (8) подают сигналы электронному контроллеру (5) (рис. 2) для распознавания результирующего угла поворота шестерни (10) (рис. 4) главного рулевого механизма. ,
Планетарный дифференциал является основным элементом, добавляемым в активную систему рулевого управления ZF. Он генерирует кинематическое перекрытие этого движения за счет дополнительного угла поворота двигателя на угол поворота рулевого колеса. Электродвигатель и планетарный дифференциал способны выполнять функции коррекции, генерируемые электронной системой, за доли секунды в зависимости от текущих условий вождения, и водитель не ощущает эти изменения во время вождения.
Двигатель постоянно соединен с винтом (4) (рис. 4) и без провисания сцепляется с червячным колесом (8), постоянно соединенным с двухдисковым хомутом (5) и тремя сателлитами (9). Направление вращения, количество оборотов и время работы двигателя контролируются датчиком вращения (6). Сателлиты обеспечивают механическое соединение с верхним (вал клапана двухточечного поворотного клапана) и нижним осевым центральным колесом. Колесо нижней оси соединено со стойкой (10). В результате обеспечивается прямая передача привода с сервотроника (2) на зубчатую рейку (1) в обоих направлениях.
Рис. 4 и 5. Поперечные сечения дифференциала планетарной передачи
1. зубчатая рейка, 2. соленоидный клапан гидравлической опоры, 3. электродвигатель, 4. винт, 5. корпус дифференциала, 6. датчик вращения двигателя, 7. электромагнитный замок, 8. колесо прокрутки, 9. сателлит, 10 шестерня, 11. солнечное колесо (осевое)
Благодаря движению прокрутки, вызванному электродвигателем, сателлитные колеса взаимодействуют с обоими осевыми колесами. Из-за разницы в количестве зубьев сателлитных колес, сцепленных с колесом верхней и нижней оси, создается относительное движение этих колес. Таким образом, вращение рулевого колеса и червячного колеса складываются вместе и передаются на зубчатую рейку основного рулевого механизма через шестерню.
В результате движения зубчатой рейки мы получаем желаемое дополнительное закручивание управляемых колес по отношению к движению рулевого колеса. Оно меньше (отрицательно), когда колеса верхней и нижней оси совместимы, и больше (положительно), чем базовое положение, когда электродвигатель не работает. Самоблокировка червячной передачи гарантирует, что вращение червяка может быть инициировано только двигателем. Кроме того, случайная частота вращения двигателя предотвращается электромеханическим замком (7) (рис. 5).
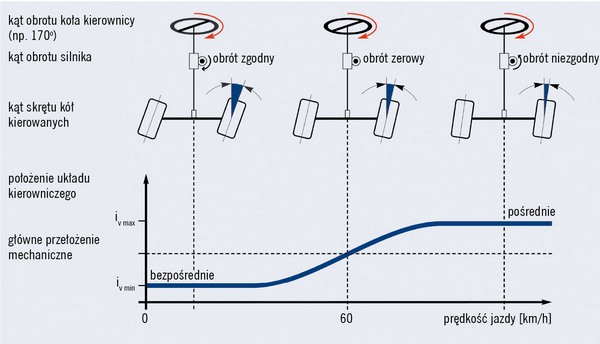
Рис. 6. Диаграмма зависимого от скорости коэффициента рулевого управления с использованием ZF-Activlenkung
Устройство управления обеспечивает связь между электрической сетью автомобиля, его датчиками и корректирующими сервоприводами. Все необходимые электронные сборки связаны с пакетом печатных плат. Эта система адаптирована для работы в диапазоне температур от -40 до + 85 ° С. Его основными электронными элементами являются два высокопроизводительных 32-разрядных микропроцессора, которые анализируют сигналы, полученные от датчиков рулевого управления, и вычисляют величину скорректированного угла поворота, который затем реализуется с помощью импульсов, посылаемых на исполнительные механизмы. Необходимые данные передаются датчиками по сто раз в секунду. Это же устройство также контролирует работу всех компонентов активного рулевого управления и, в случае неисправностей, вводит соответствующие процедуры замены.
Дополнительные функции
Активное рулевое управление выполняет не только обсуждаемые ранее кинематические функции, но и участвует в стабилизации движения. Однако для этой цели он должен быть адаптирован к конкретной модели автомобиля и соответствовать целям, установленным его производителем.
Преимуществом системы ZF Aktivlenkung является возможность взаимодействия с другими функциями, улучшающими безопасность вождения. Можно регулировать динамику движения, не только влияя на функцию устойчивости направления ESP, но и используя систему рулевого управления для компенсации гироскопического момента (рис. 7), появляющегося на поворотах дороги. Вмешательство в систему рулевого управления очень быстро и едва заметно для водителя.
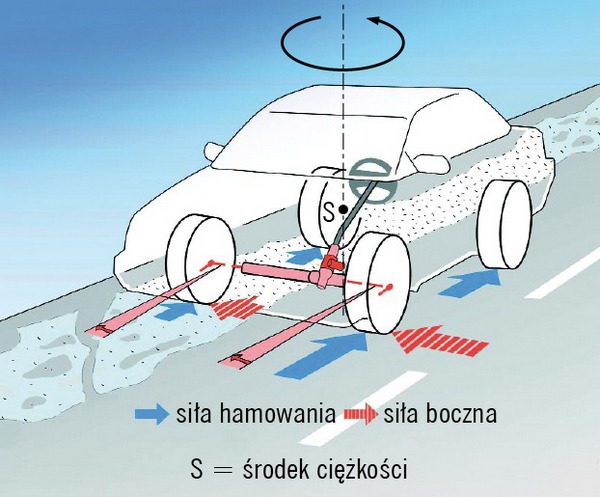
Рис. 7. Схема формирования момента гироскопа и его компенсация
В будущем система будет расширена за счет включения таких функций, как компенсация шума или вспомогательная парковка с использованием переключения рулевого механизма, в первом случае для быстрой езды на плавных арках (рис. 6), а во втором - для поворота с минимальными радиусами. Другим вариантом является периодическое повышение чувствительности системы рулевого управления к команде водителя.
В соответствии с последними концепциями полностью интегрированного контроля всех функций автомобиля, подходящие датчики предназначены для распознавания критических дорожных ситуаций и передачи информации о них центральному контроллеру, и это, после мгновенного анализа, активирует выбранные системы, такие как ESP, ZF-Aktivlenkung или ABS, - чтобы обеспечить максимально безопасное движение автомобиля.
Лешек Стрикер и Войцех Амброшко
Вроцлавский технологический университет
Статья была основана на материалах
ZF-Aktivlenkung für PKW der Mitel- und Oberklasse


